Problem
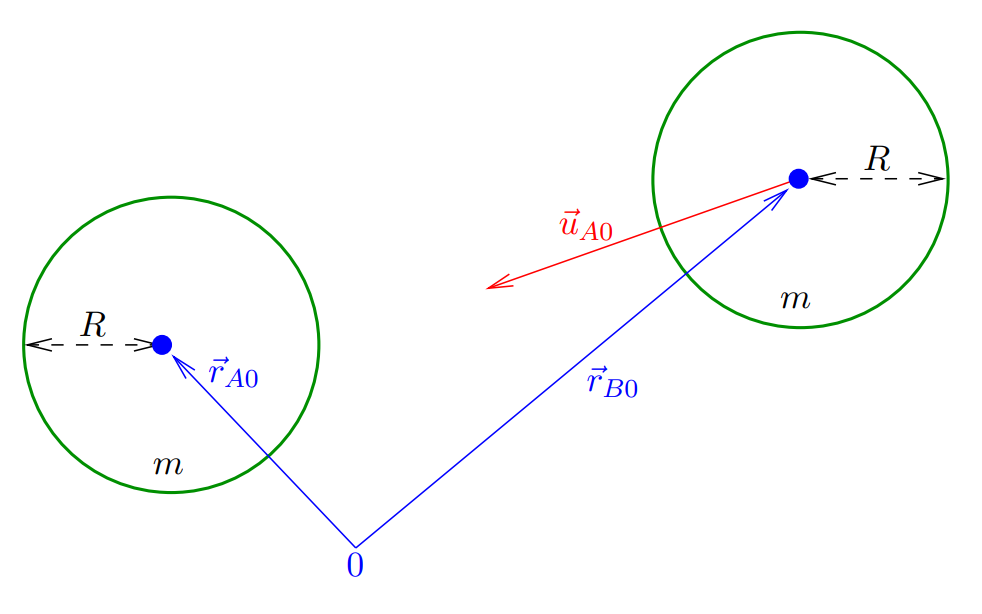
Let us consider two billiards balls on a very large pool table. Ball  is stationary located at
is stationary located at  , the other (ball
, the other (ball  ) is initially located at
) is initially located at  and has an initial velocity of
and has an initial velocity of  and is on a collision course with the first ball. The friction and air resistance cause the ball to decelerate with
and is on a collision course with the first ball. The friction and air resistance cause the ball to decelerate with  . Find the positions of both balls after collision when they stop moving. Ball are of equal size (radius
. Find the positions of both balls after collision when they stop moving. Ball are of equal size (radius  ) and mass, the collision is elastic (coefficient of restitution is equal to one).
) and mass, the collision is elastic (coefficient of restitution is equal to one).
Data
–  ,
,
–  , ,
, ,
The solution in a couple of steps
The velocity of the moving ball is
![\[\frac{d\vec{u}_B}{dt}=-\alpha \vec{u}_B\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-705194c1e47e8f51a46707fbdba8c518_l3.png "Rendered by QuickLaTeX.com")
Assuming the friction to be constant we may write
![\[\int_{\vec{u}_{B0}}^{\vec{u}_{B}}\frac{d\vec{u}_B}{\vec{u}_B}=-\alpha\int_0^tdt\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-370789b02740bd84d846b6057b2923d9_l3.png "Rendered by QuickLaTeX.com")
which leads to exponential decay of velocity with time
![\[\vec{u}_B(t)=\vec{u}_{B0}\exp(-\alpha t)\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-6d56f170a04ad8e213c289523eb52fa4_l3.png "Rendered by QuickLaTeX.com")
Expressing the location of ball B with velocity is just another integral away
![\[\frac{d\vec{r}_B}{dt}=\vec{u}_B(t)=\vec{u}_{B0}\exp(-\alpha t)\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-e51927ed152deeccb42d845d09297703_l3.png "Rendered by QuickLaTeX.com")
After integration we find, where ball will be located as a function of time
![\[\vec{r}_B(t)=\vec{r}_{B0}+\frac{\vec{u}_{B0}}{\alpha}\left(1-\exp(-\alpha t)\right)\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-b60b9f7f12a9e365710c3cdc1d7d8ab7_l3.png "Rendered by QuickLaTeX.com")
If no collision occurs, we can find the final position of the ball as
![\[\lim_{t\rightarrow\infty}\vec{r}_B(t)=\vec{r}_{B0}+\frac{\vec{u}_{B0}}{\alpha}\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-bdfed5e4bad603d0f5757fb0f04bbd7d_l3.png "Rendered by QuickLaTeX.com")
Time of collision
In the next step we have to find the time at which collision occurs. Collision will happen when the distance between the balls is equal to  , i.e
, i.e
![\[2R=|\vec{r}_B-\vec{r}_A|\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-6198fb6865d4f8d7b3058e47dbad16e9_l3.png "Rendered by QuickLaTeX.com")
or
![\[(2R)^2= \left(r_{B0x}+\frac{u_{B0x}}{\alpha}(1-\exp(-\alpha t))-r_{A0x}\right)^2+\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-cd362c6cce8061acda78f40e5931f548_l3.png "Rendered by QuickLaTeX.com")
![\[+ \left(r_{B0y}+\frac{u_{B0y}}{\alpha}(1-\exp(-\alpha t))-r_{A0y}\right)^2\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-fdc68bac05e3fe130cde503eba1533e6_l3.png "Rendered by QuickLaTeX.com")
Temporarily naming  gives
gives
![\[(2R)^2= \left(r_{B0x}+\frac{u_{B0x}}{\alpha}\beta-r_{A0x}\right)^2+ \left(r_{B0y}+\frac{u_{B0y}}{\alpha}\beta-r_{A0y}\right)^2\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-414a538e53f328e1c33ce7bf97f0c578_l3.png "Rendered by QuickLaTeX.com")
Rearranging to a quadratic equation for  :
:
![\[(r_{B0x}-r_{A0x})^2+(r_{B0y}-r_{A0y})^2-(2R)^2+\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-744a752ba20e93255964e01eb9220482_l3.png "Rendered by QuickLaTeX.com")
![\[\left( 2(r_{B0x}-r_{A0x})\frac{u_{B0x}}{\alpha}+ 2(r_{B0y}-r_{A0y})\frac{ u_{B0y}}{\alpha} \right)\beta+\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-80f786cf229eac04853b209d6793c363_l3.png "Rendered by QuickLaTeX.com")
![\[\left( \frac{u^2_{B0x}}{\alpha^2}+ \frac{u^2_{B0y}}{\alpha^2} \right)\beta^2=0 \nonumber\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-7cb589c5ac66a11de0f48e5762275124_l3.png "Rendered by QuickLaTeX.com")
Defining
![\[a = \frac{1}{\alpha^2} (u^2_{B0x}+u^2_{B0y})\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-0613921c9f8316baa9c03667d3770f6b_l3.png "Rendered by QuickLaTeX.com")
![\[c = (r_{B0x}-r_{A0x})^2+(r_{B0y}-r_{A0y})^2-(2R)^2\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-8a6e575c71e052e5ab10990a66fb4a7e_l3.png "Rendered by QuickLaTeX.com")
![\[b = \frac{2}{\alpha}( (r_{B0x}-r_{A0x})u_{B0x} + (r_{B0y}-r_{A0y})u_{B0y} )\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-43c53176303de15a8305c8270fd43ff0_l3.png "Rendered by QuickLaTeX.com")
helps us to use the quadratic formula to find the solutuion
![\[(1-\exp(-\alpha t)) = \beta = \frac{-b\pm\sqrt{b^2-4ac}}{2a}\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-8301b51f45678f5628d18ab364c394f1_l3.png "Rendered by QuickLaTeX.com")
and finally, the collision time is
![\[t=-\frac{1}{\alpha}\log\left(1-\frac{-b\pm\sqrt{b^2-4ac}}{2a}\right)\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-bdc29cda150c4c2ca2812ed429ff4fbe_l3.png "Rendered by QuickLaTeX.com")
There are two solutions for the collision time corresponding to the two points, where a line intersects a circle. For our case, the solution, which happens before is the correct one. As a side note, calculation of collision time may fail due to the fact the the square root or logarithm is undefined. When this happens, the collision does not occur (the ball is not on a collision course or stops before hitting the other ball)
At the moment of collision
At the time of collision the ball is located at
![\[\vec{r}_{Bc}=\vec{r}_{B0}+\frac{\vec{u}_{B0}}{\alpha}\left(1-\exp(-\alpha t)\right)\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-b7fac9892883bd919042a28890addd41_l3.png "Rendered by QuickLaTeX.com")
and it has a velocity of
![\[\vec{u}_{Bc}=\vec{u}_{B0}\exp(-\alpha t)\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-70491878710ce17230817116dabd8174_l3.png "Rendered by QuickLaTeX.com")
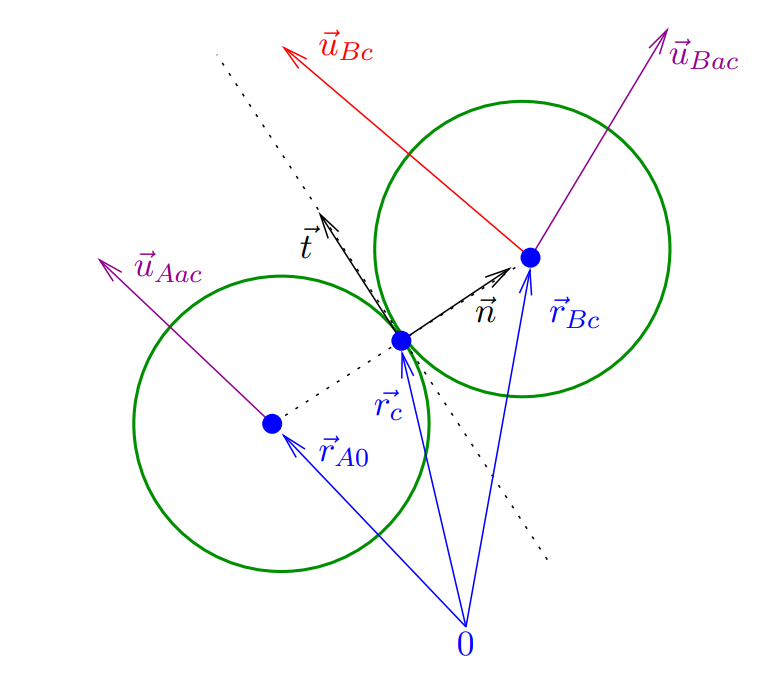
First let us calculate a vector from the center of ball to the center of ball and normalize it:
![\[\vec{n}=\frac{\vec{r}_{Bc}-\vec{r}_{A0}}{|\vec{r}_{Bc}-\vec{r}_{A0}|}.\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-e6b3911097b3949d481eeee807669dcd_l3.png "Rendered by QuickLaTeX.com")
The contact point is at
![\[\vec{r}_c=\vec{r}_{A0}+R\vec{n}.\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-03f9215eb97c018bb7932f0c2ede7aa4_l3.png "Rendered by QuickLaTeX.com")
A tangent vector to the surfaces of the spheres from the contact point is  .
.
We now decompose the velocity vectors of ball into normal and tangential directions (ball is stationary!)
![\[u_{B,t}=\vec{u}_{Bc}\cdot\vec{t},\qquad u_{B,n}=\vec{u}_{Bc}\cdot\vec{n}\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-5919b96009345552f4ed7718f1d35c34_l3.png "Rendered by QuickLaTeX.com")
During the collision the tangential components are preserved
![\[u_{Aac,t}=0, \qquad u_{Bac,t}=u_{B,t}.\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-197059325c1807810691305f2339a2a3_l3.png "Rendered by QuickLaTeX.com")
In the normal direction, the momentum is conserved and since the collision is elastic with coefficient the restitution equal to one, the normal velocity is tranffered to balla
![\[u_{Aac,n}=u_{B,n}, \qquad u_{Bac,n}=0.\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-e81d8262d12a2b766ba5be991b0b06b9_l3.png "Rendered by QuickLaTeX.com")
For a more general description of collision in 2D with an arbitrary velocity of both balls and any coefficient of restitution, see this post!
Afer collision
After collision, both balls are moving with velocity:
![\[\vec{u}_{Aac}=u_{Aac,t}\vec{t} + u_{Aac,n}\vec{n}\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-a89583a290e11a2adb96a0ce88f2e347_l3.png "Rendered by QuickLaTeX.com")
![\[\vec{u}_{Bac}=u_{Bac,t}\vec{t} + u_{Bac,n}\vec{n}\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-c3df4d32acc4718d10876035e176e7b7_l3.png "Rendered by QuickLaTeX.com")
and they come to a stop at
![\[\vec{r}_{Af} = \vec{r}_{A0} + \frac{\vec{u}_{Aac}}{\alpha}\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-95ee1dff16663c75628c591334e24a87_l3.png "Rendered by QuickLaTeX.com")
![\[\vec{r}_{Bf} = \vec{r}_{Bc} + \frac{\vec{u}_{Bac}}{\alpha}\]](https://ravnik.eu/wp-content/ql-cache/quicklatex.com-3aabc7cec6b977e120ee0ee3a4c0b862_l3.png "Rendered by QuickLaTeX.com")
Example
Consider the following data
 ,
,  ,
,  ,
,  ,
, 
Matlab solution
%
% Data
%
R=30.75/1000
alpha=0.8
rA0=[1.29; 0.56]
rB0=[1.73; 0.7]
uB0=[-0.72; -0.27]
%
% Collision time
%
a=(uB0(1)^2+uB0(2)^2)/alpha^2
b=2/alpha*( (rB0(1)-rA0(1))*uB0(1)+(rB0(2)-rA0(2))*uB0(2) )
c=(rB0(1)-rA0(1))^2 + (rB0(2)-rA0(2))^2 - (2*R)^2
dis=b^2-4*a*c
beta1=(-b+sqrt(dis))/(2*a)
beta2=(-b-sqrt(dis))/(2*a)
t1=-1/alpha*log(1-beta1)
t2=-1/alpha*log(1-beta2)
t=min(t1,t2)
%
% Ball B at collision time
%
rBc=rB0+uB0*(1-exp(-alpha*t))/alpha
uBc=uB0*exp(-alpha*t)
%
% Unit normal and tangent
%
n=(rBc-rA0)/norm(rBc-rA0);
t=[-n(2);n(1)];
%
% Collision point
%
rc=rA0+R*n;
%
% Normal and tangential velocity before collision
%
uAn=0
uBn=dot(uBc,n)
uAt=0
uBt=dot(uBc,t)
%
% Normal and tangential velocity after collision
%
uAtAC=uAt
uBtAC=uBt
uAnAC=uBn
uBnAC=uAn
%
% velocity after collision
%
uAac= uAtAC * t + uAnAC * n
uBac= uBtAC * t + uBnAC * n
%
% Final position
%
rAf=rA0+uAac/alpha
rBf=rBc+uBac/alpha
%
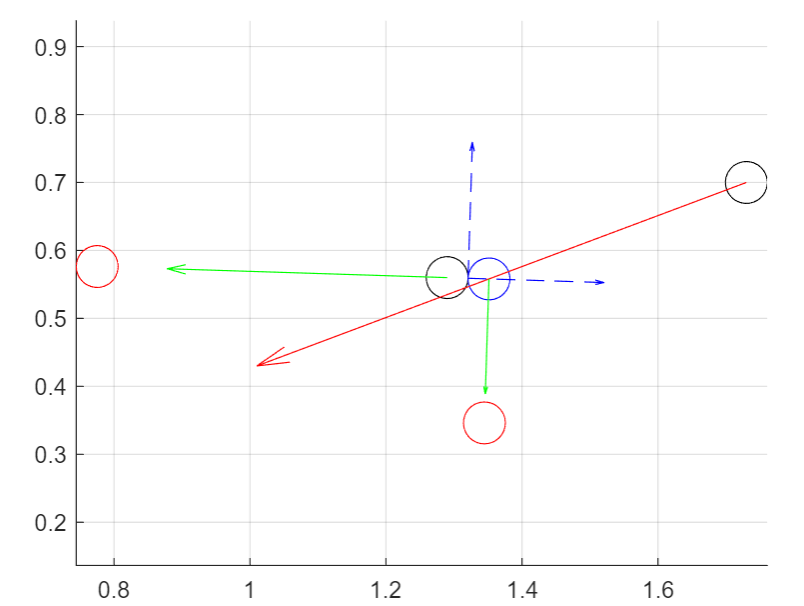
% Plot results
%
hold on
% spheres
circle(rA0(1),rA0(2),R,"black");
circle(rB0(1),rB0(2),R,"black");
circle(rBc(1),rBc(2),R,"blue");
circle(rAf(1),rAf(2),R,"red");
circle(rBf(1),rBf(2),R,"red");
% initial velocities
quiver(rB0(1),rB0(2),uB0(1),uB0(2),0,'-r')
% normal and tangent vectors
quiver(rc(1),rc(2),n(1)/5,n(2)/5,0,'--b')
quiver(rc(1),rc(2),t(1)/5,t(2)/5,0,'--b')
% velocity after collision
quiver(rA0(1),rA0(2),uAac(1),uAac(2),0,'-g')
quiver(rBc(1),rBc(2),uBac(1),uBac(2),0,'-g')
axis equal
grid on
hold off
function h = circle(x,y,r,color)
th = 0:pi/50:2*pi;
xunit = r * cos(th) + x;
yunit = r * sin(th) + y;
h = plot(xunit, yunit,color);
end
Matlab output: